Object Classification Using Range-Doppler Plots from a High Density PMCW MIMO mmWave Radar
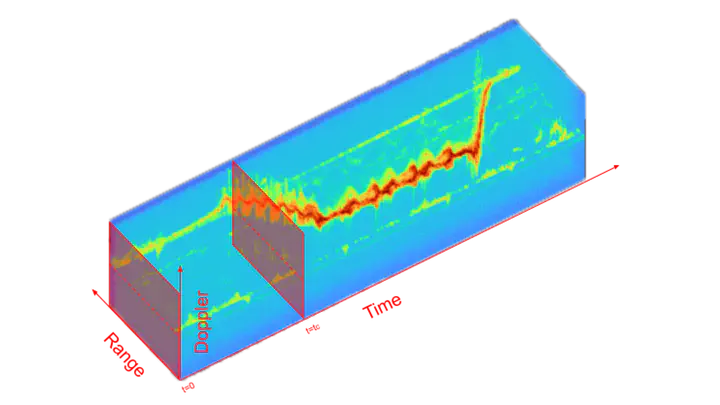 Sample range-doppler plot over time. Subject walks towards sensor, does some jumping jacks, then walks back to the starting point.
Sample range-doppler plot over time. Subject walks towards sensor, does some jumping jacks, then walks back to the starting point.
Abstract
Today, the cutting-edge commercial millimeter-wave (mmwave) radar solutions utilize a pulse modulated continuous wave (PMCW) transmission signal to obtain useful insight into the area surrounding a spatial region. These radar systems can measure near-instantaneous and highly accurate range information (range resolutions up to a centimeter-level), doppler information (resolutions up to a few cm/second), and angular information in both azimuth and elevation. Coupled with radar’s innate robustness to weather, lighting, and electromagnetic interference, this sensing modality presents itself as a unique means of complementing existing LiDAR and camera based autonomous driving capabilities. The safety of both passengers and passersby is mission critical. Therefore, it is vital that autonomous systems use their wide array of sensors to detect, track, and classify the types of objects in a scene. If this mandate can be achieved using only radar sensors, correct classification of moving objects can be done irrespective of uncontrollable circumstances like weather and lighting. In this thesis, classification of detections as either running pedestrians or driving cars is achieved using only the range-doppler information from a single forward facing automotive PMCW radar system.
Edwin Pan
Graduate Research Assistant @ SAIL
My research interests include computer vision, machine learning, robotics, and the ways these areas can improve human lives.